
Para grabar información en la superficie, se siguen una serie de códigos que transforman un patrón de bits en una secuencia de celdas con diferentes estados de magnetización.
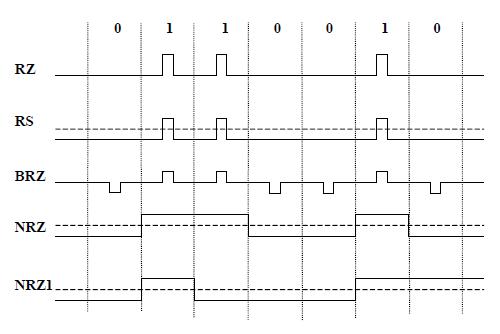
1) Retorno a cero (RZ: «return to zero»).
El 1 lógico se graba magnetizando el centro de la celda. El 0 es ausencia de magnetización
2) Retorno a saturación (RS: «return to saturation»).
El 1 se representa por un estado de magnetización en el centro de la celda. El resto de la celda y el 0 se representa con el estado de magnetización opuesto.
3) Retorno a cero bipolar (BRZ: «bipolar return to zero»).
El 1 se representa por un estado de magnetización en el centro de la celda y el 0 por el estado de magnetización opuesto, también en el centro de la celda. Los extremos de la celda quedan sin magnetizar.
4) Sin retorno a cero (NRZ: «non-return zero»).
El 1 se representa por un estado de magnetización en toda la celda y el 0 por el estado contrario, también en toda la celda.
5) Sin retorno a cero inverso (NRZI: «non-return to zero invert»).
El 1 se representa por un cambio del sentido del flujo de magnetización en toda la celda respecto al estado de la celda anterior. El 0 se representa por ausencia de cambio.
6) Codificación en fase (PE: «phase encoding»).
El 1 se representa por un cambio y el 0 por el cambio contrario. Estos cambios se realizan en el centro de la celda. Para poderse detectar dos ceros o dos unos seguidos, es necesario efectuar también un cambio al comienzo del segundo.
7) Modulación de frecuencia (FM: «frequency modulation»).
Es la codificación más sencilla, consiste en la grabación de un cambio de flujo para cada uno, y el omitir el cambio de flujo para cada cero. Es decir, siempre se produce un cambio al comienzo de la celda, en el centro se producirá un nuevo cambio de magnetización si y sólo si se graba un 1.
Este procedimiento se puede realizar con una electrónica de control relativamente simple, pero tiene el inconveniente de que cada bit de datos consume dos cambios de flujo, limitando mucho la capacidad del disco
8) Coeficiente de pulso (PR: «pulse ratio»).
La celda tiene un primer intervalo de longitud RI en un estado de magnetización, y el segundo intervalo, de longitud R2, en el estado contrario. El 1 se representa por un pulso tal que Rl/R2 < 1, y el 0 por un pulso tal que R1/R2 > 1.
9) FM modificada (MFM: «modifed FM»).
Similar a FM excepto que el cambio de estado al inicio de la celda se efectúa sólo si el bit precedente y actual son ambos 0.
10) Modulación de frecuencia modificada-modificada (MIFM: «modified-modified FM).
Igual que FM pero sólo se efectúa el cambio de estado al comienzo de la celda si la celda anterior no contiene ningún cambio (ni al principio ni en el centro), y la celda actual no es un 1 .
Fuente: Estructura de Computadores, Facultad de Informática, UCM